Technical Report · 2026
Let Your Data Build and Improve Itself
DataEvolver is an autonomous synthetic data construction framework where goal-driven loop agents orchestrate the full pipeline — from text-to-image generation through 3D reconstruction to scene-aware rendering — and iteratively refine output quality via VLM feedback loops.
📄 arXiv 2605.01789
🏆 KDD Workshop Oral
🎖️ BAAI Poster
350
Training Pairs
50
Unique Objects
24
Atomic Actions
6
Pipeline Stages
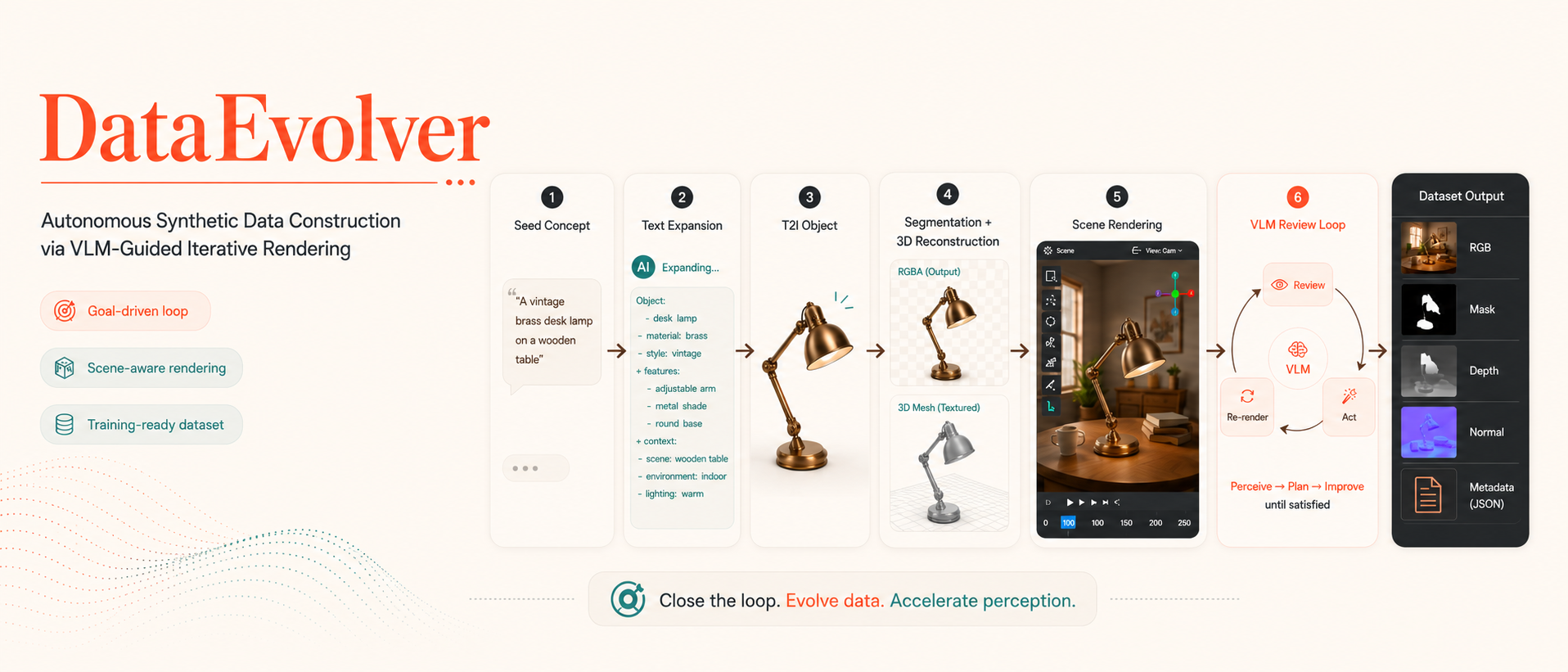
Autonomous render-review-fix data construction
Seed concept → 3D rendering → VLM review loop → multimodal dataset output
VLM-guided























